Totaladaptive control with mod. 5 Continuous-Time Model Reference Adaptive Control 131 51 Introduction 131 52 Simple MRAC Scheines 134.

Model Reference Adaptive Control Structure Download Scientific Diagram
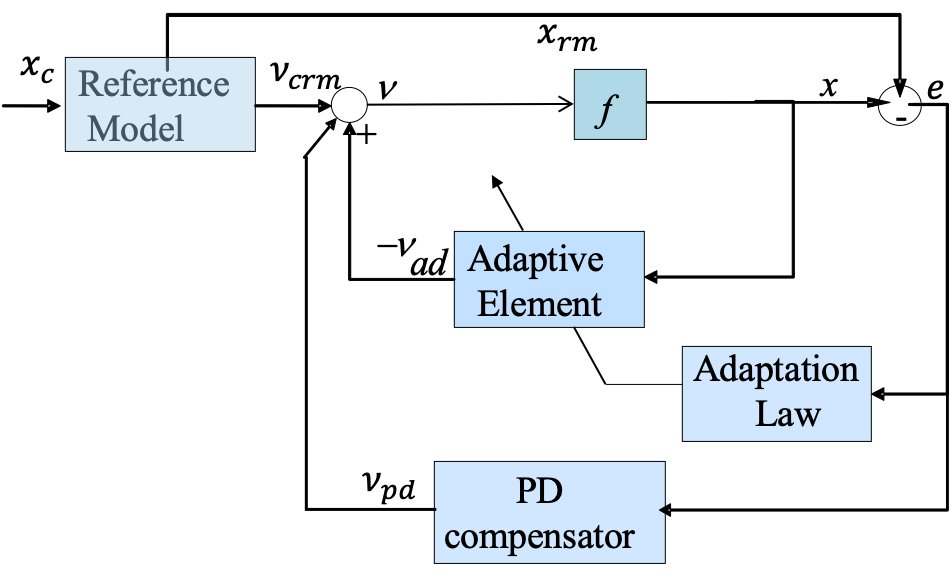
There are three main elements of this model.

. Reference Model Plant. Linearcomponent of adaptive control signal. Adaptive Control Tutorial is designed to serve the needs of three distinct groups of readers.
µ mod Design Steps. Model Reference Adaptive Control Compute control actions to make an uncertain controlled system track the behavior of a given reference plant model. Model-Reference Adaptive Control-Nhan T.
The Model Reference Adaptive System MRAS is used to obtain systems performance specifications in terms of model reference. 1 Adaptive Control Theory. An adaptive control system is mainly dedicated to the elimination.
It is known that we can synchronize the leaders output to the references output by using a well-known model reference adaptive control in Chapter 53 in 18 which leads to the controller. By using a gradient method the MIT rule or by using a stability theory Lyapunov. Engineers and students interested in learning how to design simulate and implement parameter estimators and adaptive control schemes.
Text Books 3 Lecture notes P. Petros Ioannou and Barış Fidan. A model reference describes the desired response for a DC electrical drive.
Design MRAC controller that adapts plant uncertainty model parameters to achieve performance that. An ideal response for reference model is designed by modeling the dynamic DC motor. Simple Adaptive Control Example.
Adaptive Control Tutorial Petros loannou University of Southern California Los Angeles California. The adaptive control system used is Model Reference Adaptive Control MRAC which contain four part. About Press Copyright Contact us Creators Advertise Developers Terms Privacy Policy Safety How YouTube works Test new features Press Copyright Contact us Creators.
April 21 2021 reference model parameters am2 bm2 plant parameters that are unknown during control design a1 b05 final values of the parameters for verification of convergence theta1finalbmb theta2finalam-ab reference model. And Jacobson David H Primer on Optimal Control Theory Betts John T Practical Methods for Optimal Control and Estimation Using Nonlinear Programming Second. Nguyen 2018-03-01 This textbook provides readers with a good working knowledge of adaptive control theory through applications.
Up to 10 cash back Stability proofs are provided for all adaptive control techniques without obfuscating reader understanding with excessive mathematics. For this reason we are placing the. Choose safety zone and sufficiently large Define virtualconstraint.
The Optimal Model Reference - Short tutorial Itzhak Barkana BARKANA Consulting 113 Hashomer St Ramat Hasharon 47209 Israel. Guaranteed Robustness with Fast Adaptation Speyer Jason L. The book begins with standard model-reference adaptive control MRAC for first-order second-order and multi-input multi-output systems.
MATLAB simulation of a model reference adaptive controller Author. Adaptive control systems are time varying and nonlinear thus more challenging to analyze and understand than traditional linear time invariant controllers. Model reference adaptive control MRAC has been receiving increasing attention during the last few years as a valuable method for dynamic control of mechanical manipulators.
They are reference model adaptation mechanism plant and control law. Model Reference Adaptive Control Adaptive Pole Placement Control Adaptive Control for Non-linear Systems. 8 Adaptive Control of Nonlinear Systems 281 81 Introduction 281.
One of the major reasons for adaptive control lies in the dynamics of mechanical manipulators which are highly nonlinear and characterized by time varyingunknown parameters. Graduate students who also want to understand the analysis of simple schemes and get an idea of the steps involved in more complex proofs. We designs DC motor plant by using Simscape in Simulink.
In MRAS the adjustment mechanism can be obtained by applying two methods. 11th IFAC International Workshop on Adaptation and Learning in Control and Signal Processing July 3-5 2013. Graduate students who in addition to attaining the aforementioned.
The stability proofs are often long and technical and possibly distracting to readers who prefer to focus on the design and implementation of adaptive control. A Course on Adaptive Control - 1 11 Adaptive Control versus Conventional Feedback Control A conventional feedback control system is mainly dedicated to the elimination of the effect of disturbances upon the controlled variables. Fidan Adaptive Control Tutorial SIAM 2006.
Caen France ThS4T41 Simple Adaptive Control. Aleksandar Haber Date. Engineers and students interested in learning how to design simulate and implement parameter estimators and adaptive control schemes without having to fully understand the analytical and technical proofs.
11 Robust and Adaptive Control WorkshopAdaptive Control. For this example we have used direct adaptive method called Model Reference Adaptive Controller MRAC. Adaptive Control Tutorial is designed to serve the needs of three distinct groups of readers.
Introduction Overview and Applications. Simulation results showing the feasibility and performance of the proposed approach over given. It is intended for students beginning masters or doctoral courses and control practitioners wishing to get up to speed in the subject expeditiously.
Download scientific diagram Model reference adaptive control. The goal is to construct a controller so that the system output y matches the output. Objective of this example is to demonstrate how to design and model adaptive controller tune and analyse its performance using Simulink.
Adaptive Control Tutorial Chapter 5 Continuous-Time Model Reference Adaptive Control.

5 Model Reference Adaptive Control Mrac Download Scientific Diagram
Model Reference Adaptive Control Girish Joshi

Pdf Design Of A Model Reference Adaptive Controller Using Modified Mit Rule For A Second Order System 1 Semantic Scholar

Model Reference Adaptive Control Scheme Of Dc Drive Download Scientific Diagram

Pdf Design Of A Model Reference Adaptive Controller Using Modified Mit Rule For A Second Order System 1 Semantic Scholar

Discrete Time Pid Based Model Reference Adaptive Control Simulink

Model Reference Adaptive Control Pdf
Simple Adaptive Control Example File Exchange Matlab Central
0 komentar
Posting Komentar